Work
Being a multi-disciplinary engineer means having a larger playground! Over the years I've worked on interesting products across domains and industries (from social webapp to indoor robots and robotic food kiosks) using my software and hardware building skills.
Ondigo: Robotic food kiosks
2022 | Ondigo.in
Customers' problem
Millions of commuters travel for 3+ hours in Mumbai itself. They need hot food during commutes, but don't have any good options on-route.
So they settle for chips and soda. They're spending money on alternatives, but not satisfied.

Product
Ondigo is a 10sqft robotic food kiosk, which can be placed anywhere with ease, especially at places with high foot-traffic where renting space is super expensive. Ondigo enables local food vendors to decouple their kitchens and point-of-sales to increase their sales and operation hours multi-fold.
Result
The robotic food kiosk was able to generate 9X revenue for food partners of Ondigo. It caught attention of the media and was featured in a national newspaper. It was shortlisted for Techstars and selected in MassChallenge US Early Stage Accelerator's 2022 cohort (1 of the only 5 companies to do so).
Nubot: Home assistance robots
2019Customer' problem
Most vacuum cleaner robots had separate models for vacuuming and mopping in 2019. Those which had both in single product, did a bad to decent job at mopping, which is critical part of daily home cleaning in India for two reasons. One, there's too much dust in India and mopping is a habit. Two, we associate the coolness of floors post-mopping with cleanliness. So the focus was to make a cleaning robot specifically for Indian customers, with emphasis on mopping really well.

Product
A full-fledged vacuum robot with indoor delivery feature and software marketplace to overlay apps and use hardware for more tasks. Built from scratch in my bedroom in just $600.
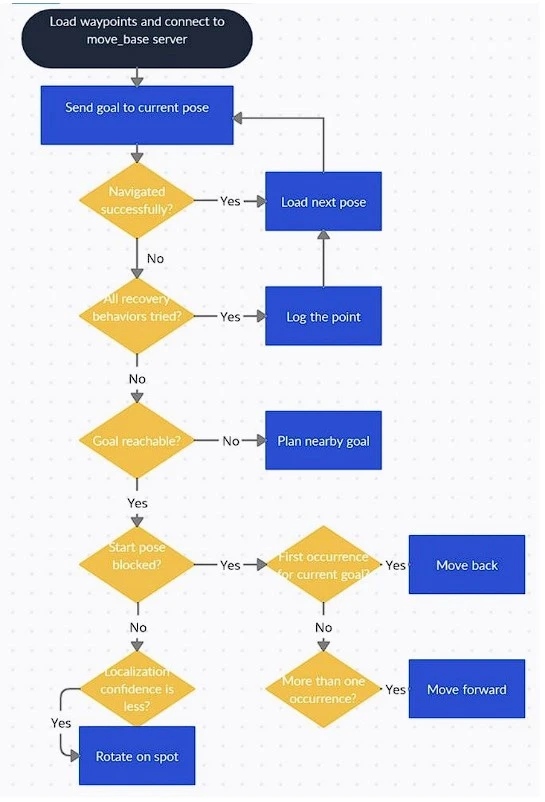
Software stack
- Designed and wrote software for custom navigation and recovery behavior, docking, remote teleoperation and monitoring using Python and C++
- Developed Nubot's system by integrating 30+ ROS nodes.
- Implemented SLAM, visual odometry, coverage path planning, battery management, startup and background processes, path planning remote server and webapp.
Cleaning
- Breakdown house map into cells using boustrophedon cellular decomposition, generate graph of each unit area and cover them.
- Designed behavior tree to navigate through waypoints, handle failures and plugin custom recovery behaviors for a robust performance in unknown environment.
Docking and charging
- Reduced cost by designing custom modulated IR code to send docking signals at faster rate compared to NEC protocol.
- Designed FSM in Python to dock autonomously based on IR signals and start charging when in contact with charger.

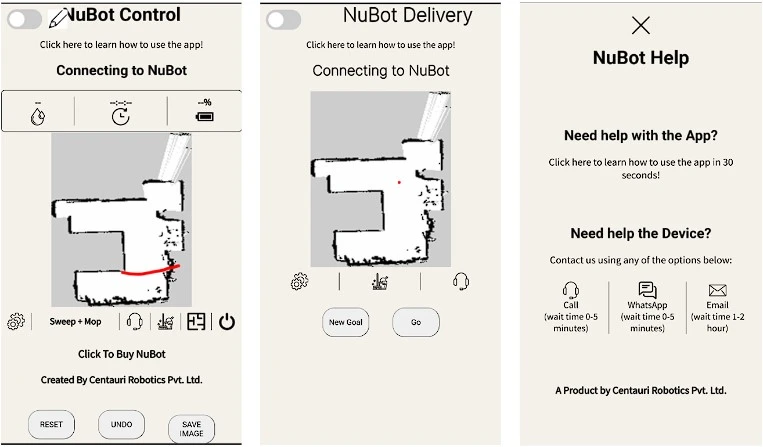
Webapp Monitor and Control
- Built distributed computing system to plan coverage path, crop maps and collect usage data using Node.js, Express, Python, WebSocket and JSON.
- Developed webapp for remote teleop, control, and monitoring from any device using Node.js, CSS.
Hardware stack
Sensors
- 2D LiDAR, wheel odometry, cliff sensors (VL53X), IR laser sensor for edge following (VL53X), bumpers, IR LED and receiver (TSOP 1738) for docking, battery sensors.
Mechanisms
- 2 wheel drive using geared DC motors with suspension and encoders.
- Sweeping: 2 front brushes and main roller using geared DC motors.
- Mopping: peristaltic pump-based water control and dispensing, gravity based mop pad
- Autonomous docking and charging with spring based charge plates.
- Delivery rack
CK-9: Hardware + software dev kit for robotics
2019 | CK-9 WebsiteCustomers' problem A few years back, it was incredibly hard to source components and fabricate your first robot. When I built my first robot, I didn't know anyone around me who'd done it, no shops had the components required and as a programmer I didn't know much about mechanical processes to build hardware. Those who knew how to do it also had to spend a lot of time building their hardware and getting the software setup on dev boards. It was too much grunt work even to get something basic running, let alone SLAM and other autonomous functions.
Product
I took this problem I personally faced and developed CK-9. CK-9 is all hardware and software bundled in one box to get it up and running in no time, and super affordable with handy tutorials for beginners too. It gained popularity not just amongst students, but also by APAC companies to quickly prototype or train their new hires.
CK-9 software was open-sourced and its simulation package for gazebo was launched during COVID-19 lockdowns to help students continue learning at home.

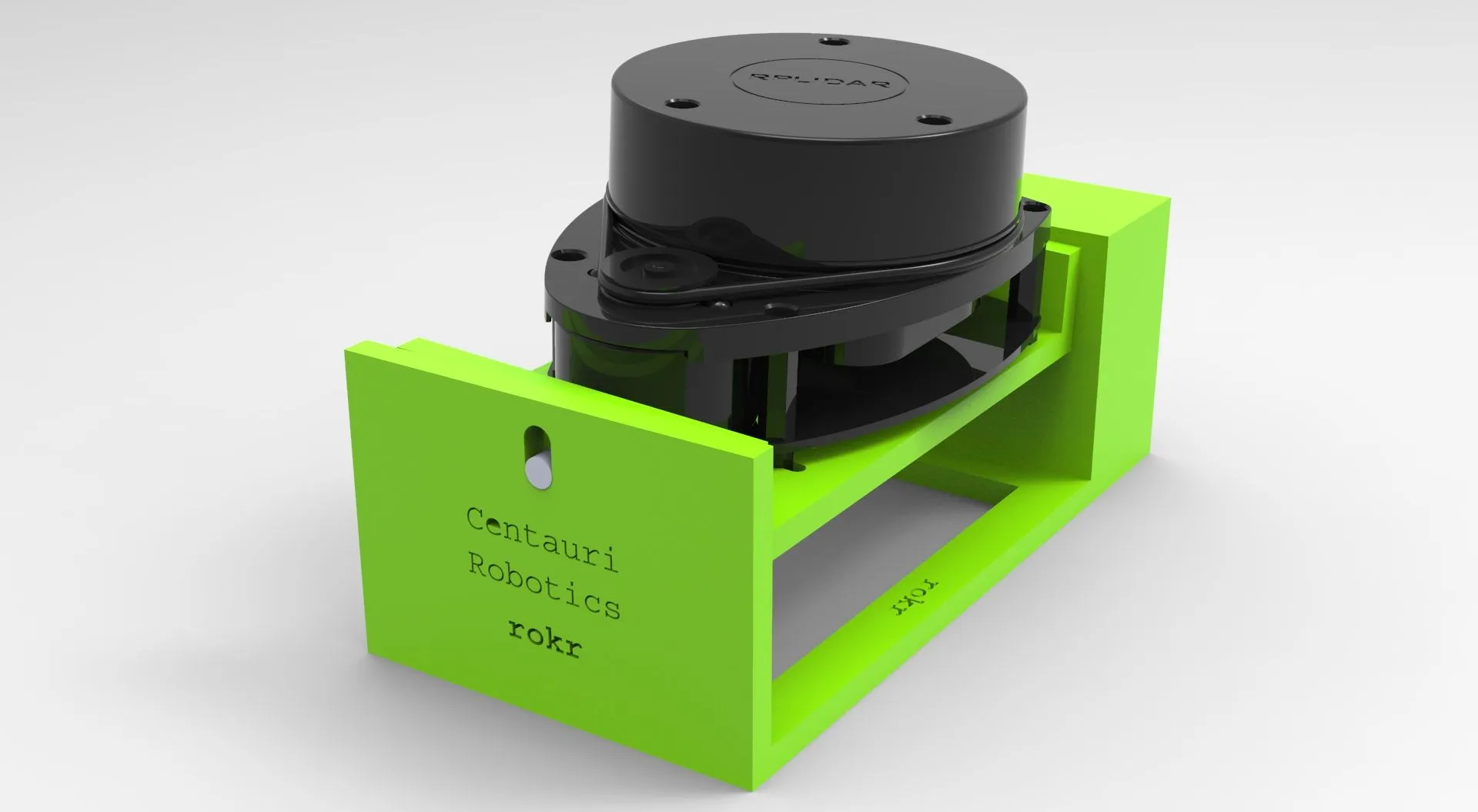
rokr: Augment your sensor's capability for fraction of cost
2021 | WebsiteThis was a failed attempt at Centauri to develop a converter device which can house a 2D planar LiDAR and pitch (or, rock) it to generate a 3D pointcloud. We had some promising results at albeit at low scan frequency and launched a pre-order campaign. However, we stopped working on it, returned customers' money and focussed my efforts on Ondigo.
LyfLime: Social App for college students
2017 | LyfLimeUsed PHP, MySQL, jQuery for a social webapp side project for students to find classmates, events, study material and more. Gained 3000 users.